Multimodal Asynchronous Kalman Filter for monitoring unstable rock slopes
1 Department of Environmental Sciences, Western Norway University of Applied Sciences, Sogndal, Norway
2 Department of Computer Science, Electrical Engineering and Mathematical Sciences, Western Norway University of Applied Sciences, Bergen, Norway
3 Department of Civil Engineering, Western Norway University of Applied Sciences, Bergen, Norway
4 Norwegian Water Resources and Energy Directorate, Trondheim, Norway
Geomatics, Natural Hazards and Risk · 2023
Abstract
The idea begind the paper is to merge data from different sensors, that may record different types of data at different sampling rates. This will ultimately lead to a high resolution dataset in space and time even if the single sensors do not have a high spatial or temporal resolution. We showcase the application on data from an unstable rock slope where a set of sensors monitored the displacement of a distinct rock section.
Background
In real-life moinitoring of unstable rock slopes a variety of constraints makes it such that sensor networks set up to monitor displacement are made up of a mix of different sensor types. This leads to a mix of types of data that is being recorded, i.e. angular data for rotations, displacement from satellite remote sensing, ground-based remote sensing and in-situ measurements of different types. The different sensors have usually different strengths, having high temporal resolution (recordings every hour) for example versus high spatial resolution (can record at millimeter precision). Also different sensor have different measurement errors due to the different techonologies used to record data as well as missing data due to outages, data transfer failures or weather. Combining these different measurements into one confident estimate of the actual displacement of an object (for example a rock section on an unstable rock slope) can offer very important insights.
Key Ideas
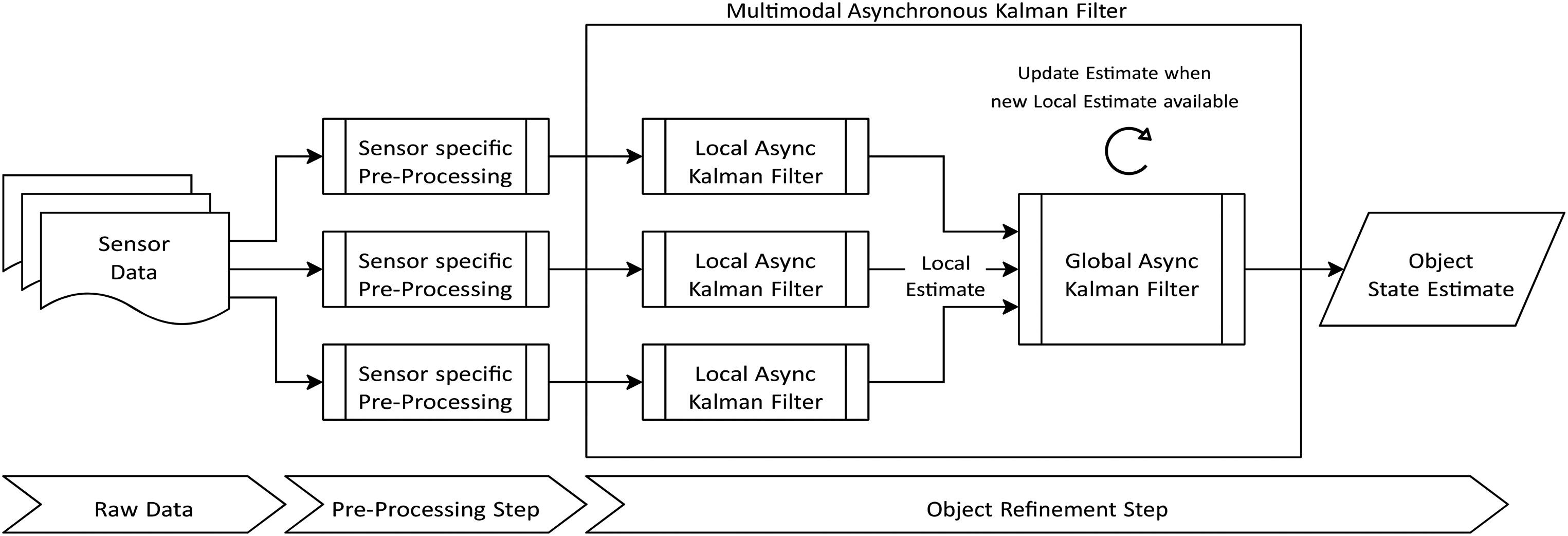
- We model the rock section as a linear system with roto-translational displacement along three axes.
- The local filters asynchronically update their estimate using the time difference to the last update to compute the state estimate before updating with the actual measurement.
- Local filters use covariance matrices derived from the sensor specifications on measurement errors.
- The global filter updates the estimate each time a new local filter value is available and uses the last available local update for all other local estimates.
Application
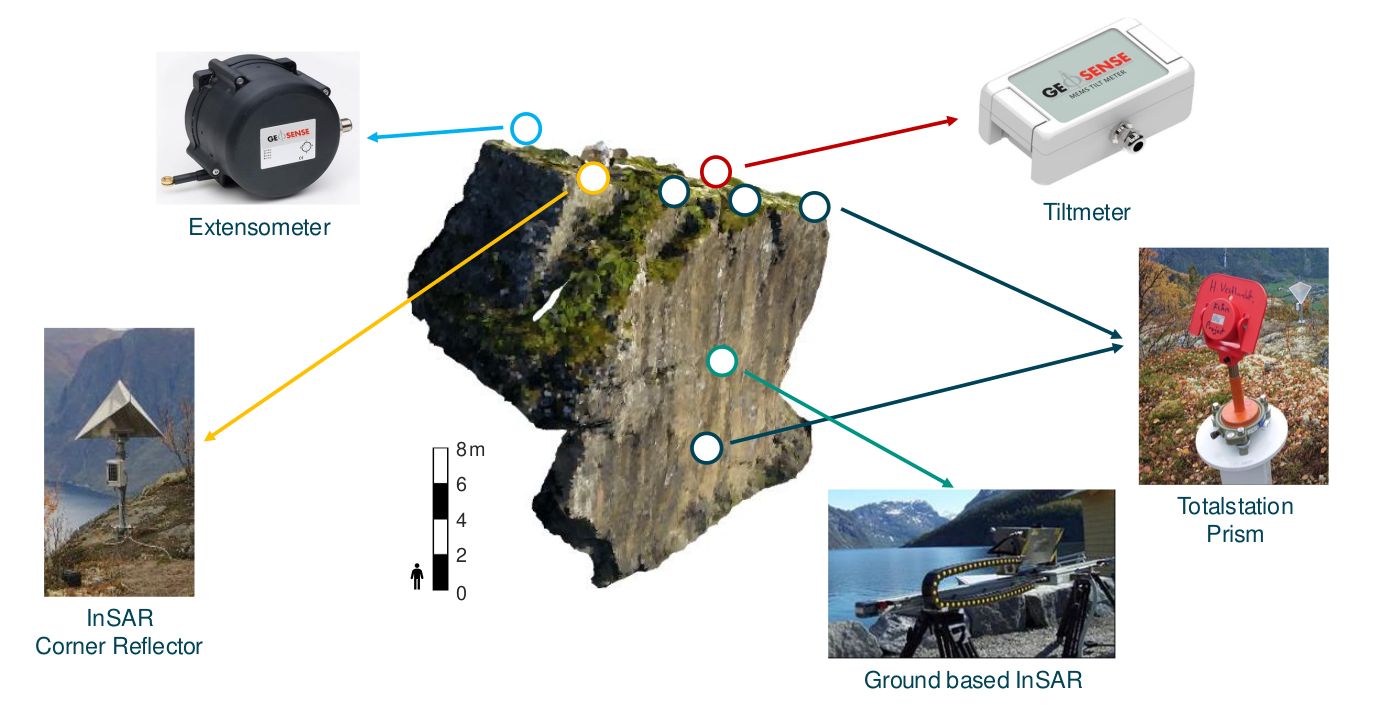
Figure 1 illustrates the application setup: Sensor network on a rock section where the goal is to get an accurate estimate of the 3D displacement of the monitored object.
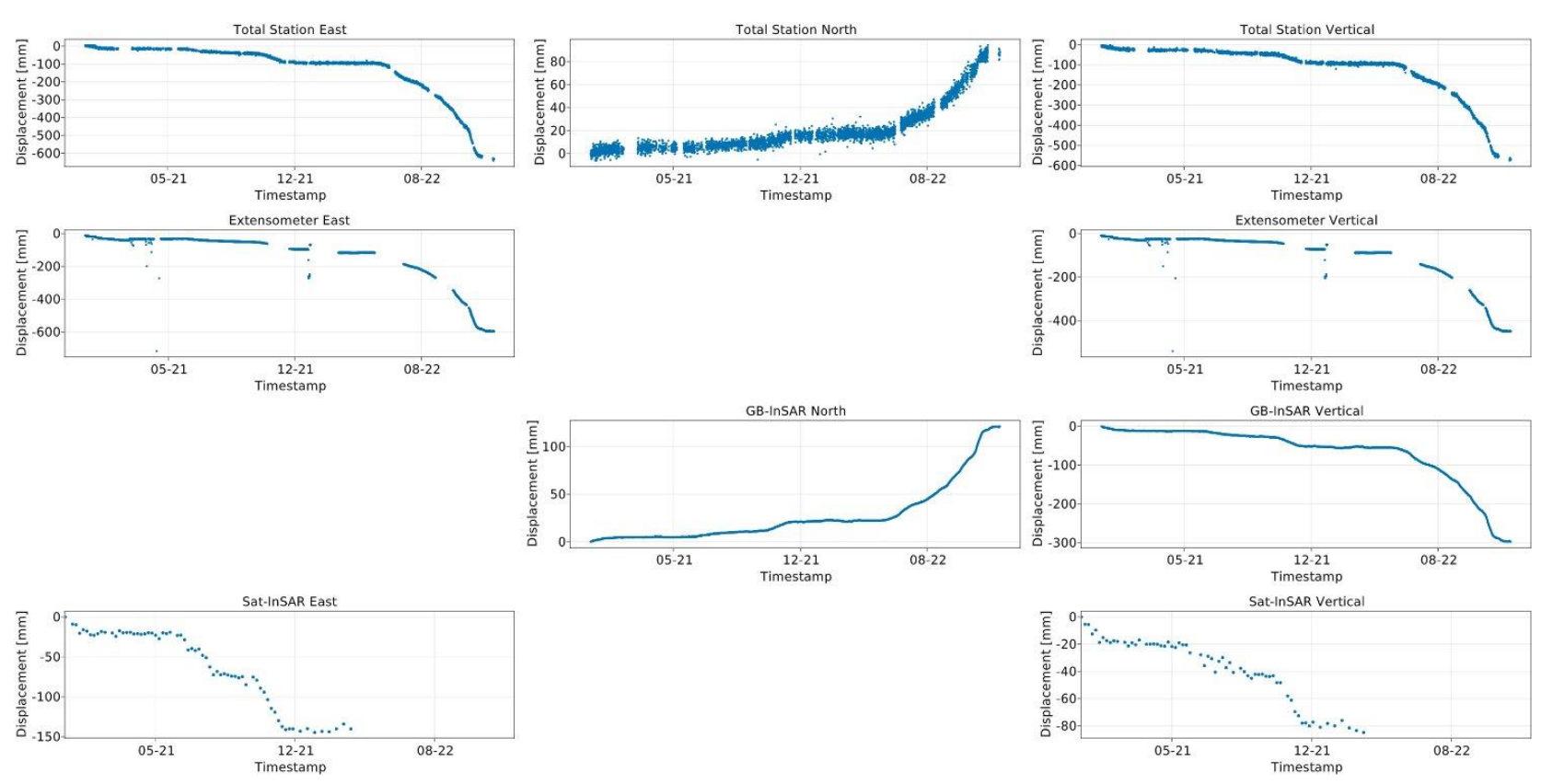
The data in figure 2 is the input data from all the different sensors, pre-processed to reflect displacement along the three axis (North, East and Height)
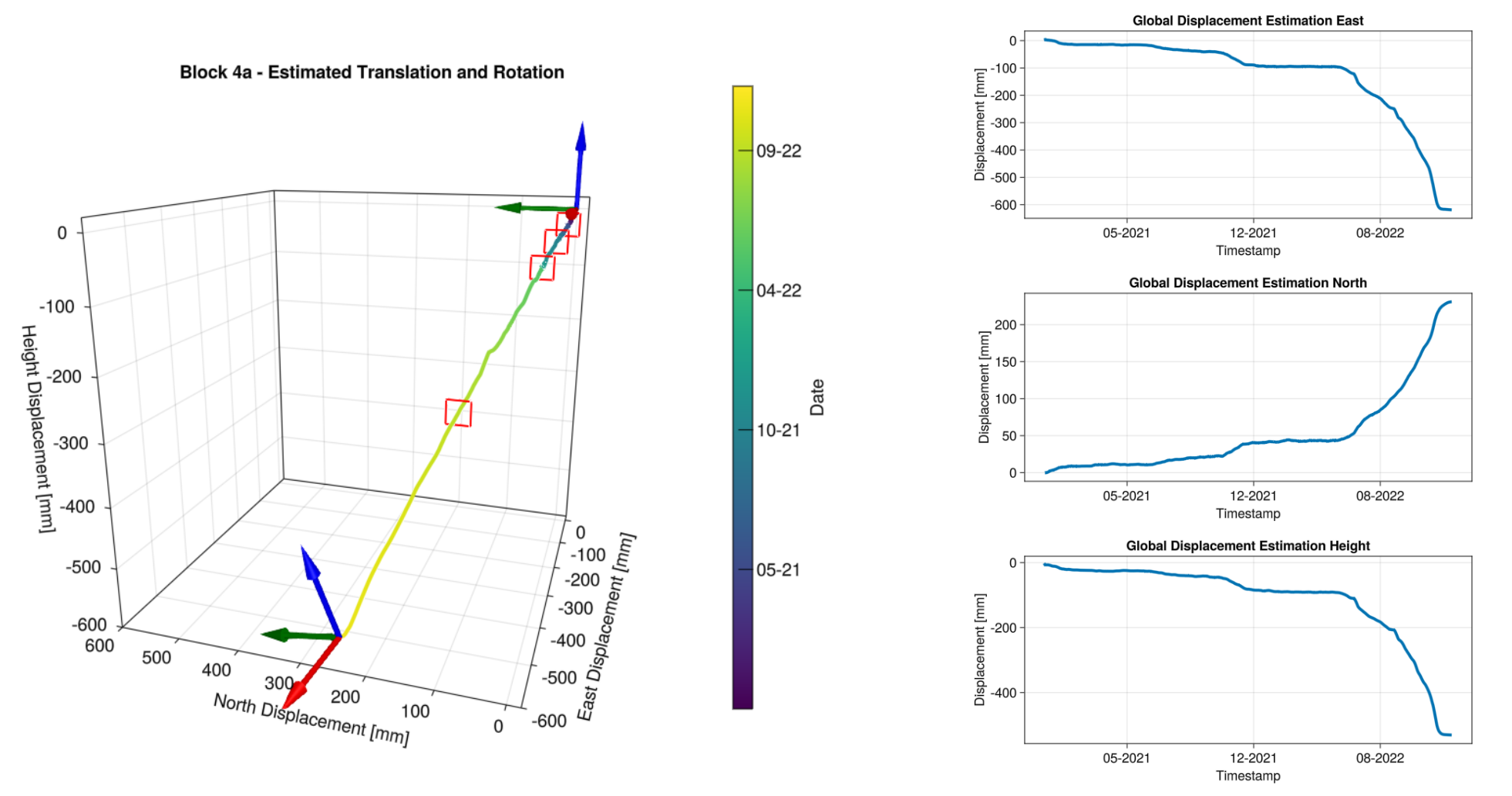
The filter produces the following output given this input:
Conculsion
Using the framework to combine data from different sensors gives important insights into the displacement patterns of objects of interest. The result can be used in analyses further down the processing pipeline, such as investigating the drivers of the displacement and for forecasting.
Citation
@article{schild2023makf,
title={Multimodal Asynchronous Kalman Filter for monitoring unstable rock slopes},
author={Schild, Lukas and Scheiber, Thomas and Snook, Paula and Arghandeh, Reza and Samnøy, Stig Frode and Maschler, Alexander and Kristensen, Lene},
journal={Geomatics, Natural Hazards and Risk},
volume={14},
number={1},
pages={2272575},
year={2023},
doi={10.1080/19475705.2023.2272575}
}